Halloween Flyer 2
After the time crunch of HWF-1 in 2020, I thought on October 25 th 2022 “why not trying to build a new HWF? 5 days is plenty of time!” The result was an interesting idea and a good next step in the HWF series, but no working HWF was produced. In early 2025, the physical parts of HWF-2 were taken apart in the “great sorting: 2025” but I still have some half-baked CAD and a few sketches.After reviewing HWF-1, two options for combining the position control system and the candy dropping “flyer” were identified: physically combine the two modules, or link them with wireless communication. HWF-2 was a study of the first physical combination option. Another major change compared to HWF-1 was switching from using 2 nylon monofilament guidelines to 1 Kevlar line. I didn’t spend much time on any concepts for attachment to endpoints or tensioning in this revision, and the same goes for the control system. HWF-2 ended with just the mechanical design for the flyer being fleshed out.
So what did get done?
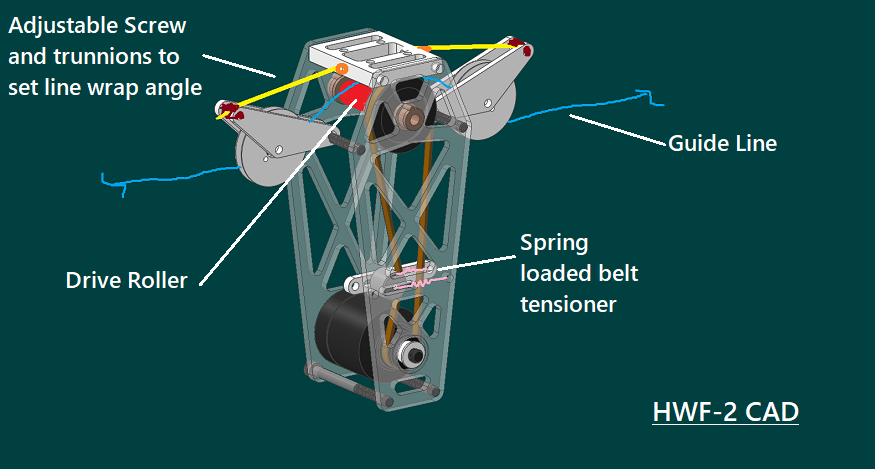
As mentioned, I don’t have any photos of what got built, but everything that’s in CAD was made, plus a bit more (shown in MS paint markups). Conceptually, this was the “drive & control module” and the “dropper” would be a separate assembly hung off the bottom. A key feature of the design were the two adjustable screws (MS painted in yellow) that would change the wrap angle of the roller, rotating the position of the flyer around the guide line. This would allow for both a more interesting pose as the flyer descended, and a way to adjust the roller traction.
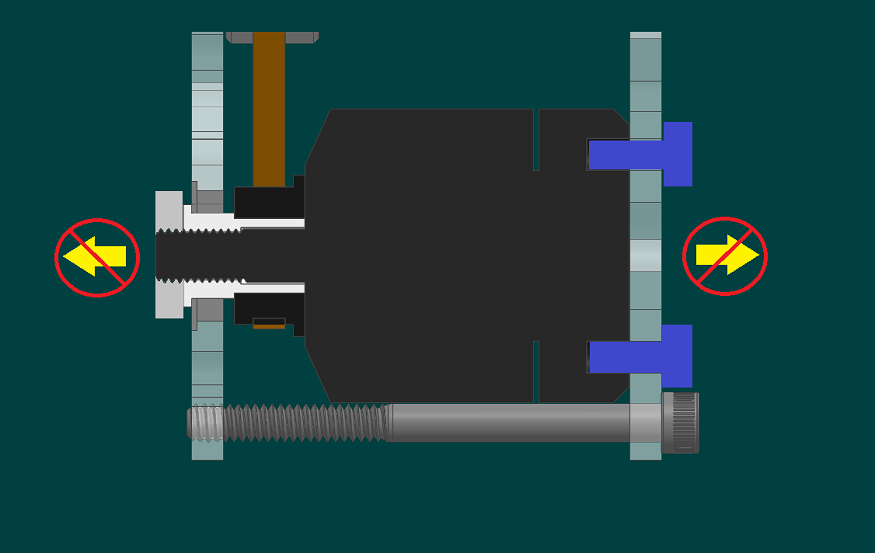
A cool feature of the motor pulley insert is that it turns the outrunner motor into a structural component by tying both printed side plates of the flyer together. The nut that held the pulley had not great thread engagement, but held well with a dab of CA glue. The drive motor chosen was a 900KV HItec EP2216. I had a few of these on hand, and the integrated ESC is a high plus in terms of wire management for compact builds. The drive reduction was again made from old printer pulleys and a 1mm pitch belt and the 16mm OD drive roller was pulled from an inkjet paper feed. The drive ratio in the model was 2.1:1 which wasn’t great in terms of startup torque on the sensorless motor, so I swapped it out to 4:1 and an 8mm roller, which worked much better.
Testing and Conclusions:
For testing, I just hooked up a 24V power supply to the motor with 16ft of 14ga wire trailing behind the flyer frame, which was rigged to run on a line between 2 folding chairs. An Arduino nano was used to provide PWM for the esc. Some things learned were:1: An 8mm roller 30A(ish) durometer would get shredded pretty fast in continuous operation
2: The Roller would slip at high startup speeds, so some sort of ramp input would be good when accelerating
3: It would easier to get more speed and torque out of a stationary position control system, I should have though of this before getting as far into HWF-2 as I did, but early testing with some added weights pretty much settled my approach for HWF-3.
4: I was happy with what I was able to learn in the brief duration of HWF-2, but as stated twice earlier, wish I would have gotten more photos/video of testing!